Richard Hoffmann
Computing + Mathematical Sciences Junior at Caltech.

Hey! I’m Richard, a third-year undergrad at Caltech studying Computer Science and minoring in Control & Dynamical Systems. I’m fortunate to be advised by Prof. Adam Wierman.
My research interest covers a mix of reinforcement learning, control-theory, generative modeling, and spatial intelligence. I’m excited about multi-agent RL, specifically how intelligence emerges from interacting populations. I’m also interested in generalizing robot learning and planning via video world models.
Before, I worked on post-training with Prof. Tony Yue Yu at Caltech, and before that on predictive vehicle dynamics under Dr. Alec Reed at CU Boulder’s Autonomous Robotics Lab. I’ve interned at Amazon AWS in Seattle and Commerzbank in New York City.
News
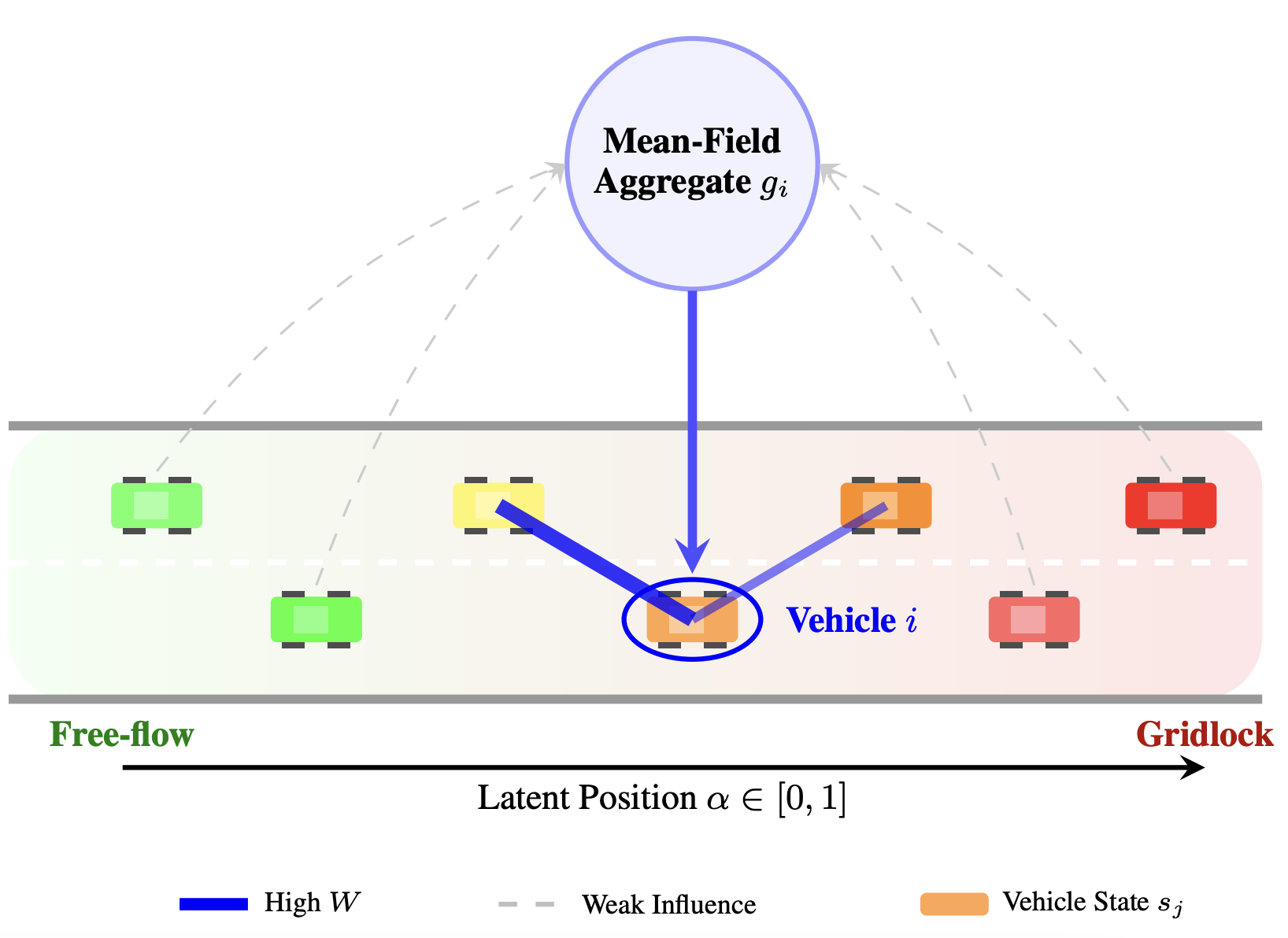
| Feb 18, 2026 | We introduce GMFS, a scalable framework for multi-agent reinforcement learning that maintains near-optimal performance in heterogeneous populations. |
|---|---|
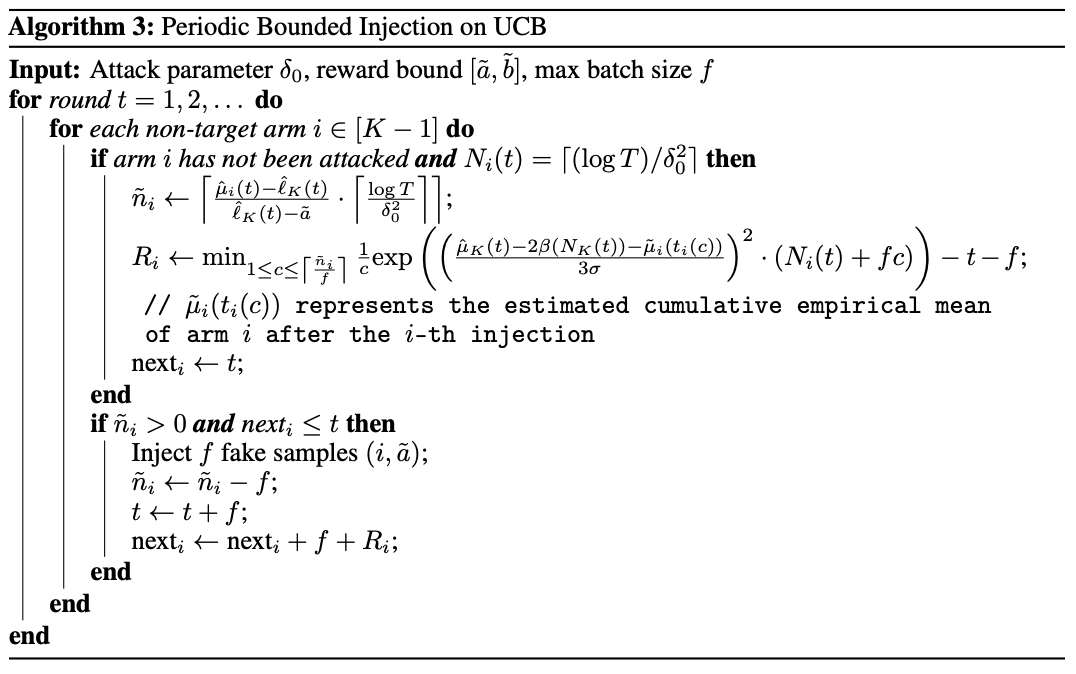
| Jun 01, 2025 | We demonstrate both theoretically and empirically that Practical Adversarial Attacks on Stochastic Bandits via Fake Data Injection can effectively mislead popular algorithms like UCB and Thompson Sampling with minimal attack cost. |
| Mar 01, 2025 | We explore a novel neural population code method to accurately estimate object orientation in Object-Pose Estimation With Neural Population Codes. |