Richard Hoffmann
Computing + Mathematical Sciences Junior at Caltech.

Hey! I’m Richard, a third-year undergrad at Caltech studying Computer Science and minoring in Control & Dynamical Systems (CDS). I’m advised by Prof. Adam Wierman.
I’m particularly interested in applications to self-driving vehicles and intelligent robotics, specifically through RL, spatial reasoning, large language models, and perception. Right now, I’m researching scalable multi-agent RL! I’m also working on LLM post-training to prove polynomial inequalities under Prof. Tony Yue Yu at Caltech. I’ve previously worked under Dr. Alec Reed at CU Boulder’s Autonomous Robotics Lab on predictive vehicle dynamics.
I previously interned at Amazon AWS in Seattle and Commerzbank in New York City working on software development.
news
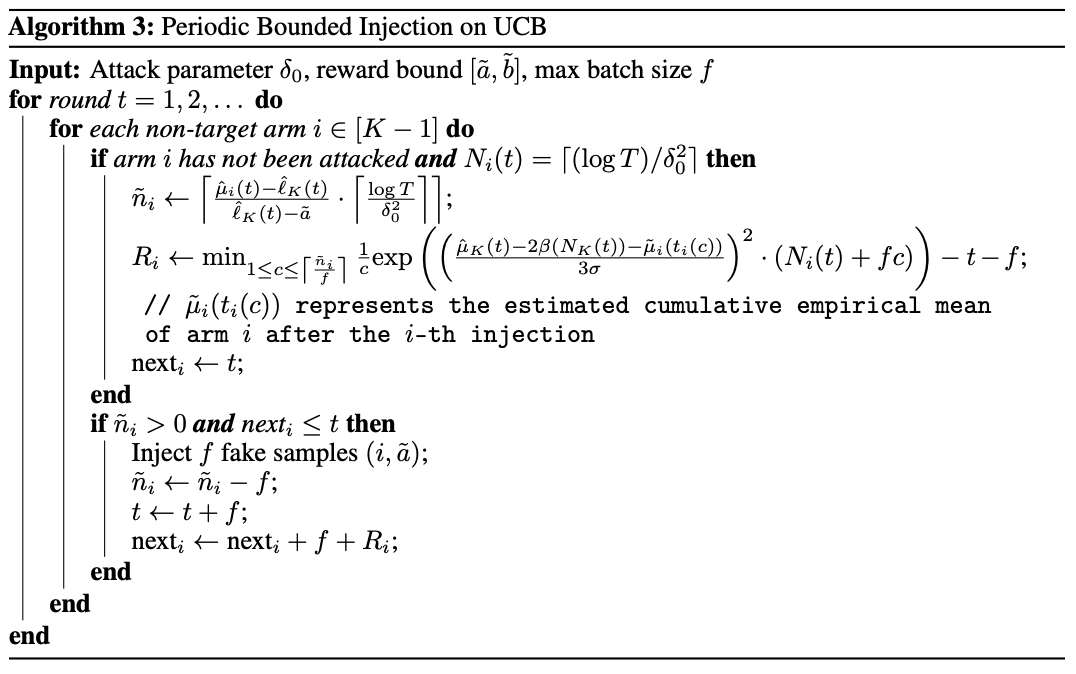
| Jun 01, 2025 | We demonstrate both theoretically and empirically that Practical Adversarial Attacks on Stochastic Bandits via Fake Data Injection can effectively mislead popular algorithms like UCB and Thompson Sampling with minimal attack cost. |
|---|---|
| Mar 01, 2025 | We explore a novel neural population code method to accurately estimate object orientation in Object-Pose Estimation With Neural Population Codes. |
selected publications
-
 Practical Adversarial Attacks on Stochastic Bandits via Fake Data Injection2025
Practical Adversarial Attacks on Stochastic Bandits via Fake Data Injection2025